











QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай

1 、 Обзор проекта
Этот план направлен на настройку системы платформы для обучения роботов для удовлетворения потребностей в университетской лаборатории в области машинного зрения и контроля силы. Система будет разработана вокруг совместного робота AUBO-I5, промышленной камеры Hikvision, 3D-камеры и шестионого датчика силы для достижения таких функций, как управление роботом, визуальное осмотр и сборка управления силой, и обеспечить программное обеспечение верхнего компьютера с открытым исходным кодом для последующего функционального расширения.

2 、 Системный аппаратный состав
Робот: принятие совместного робота Aubo-I5, он обладает характеристиками высокой точности и высокой безопасности и подходит для сценариев обучения.
Камера: включая промышленную камеру Hikvision и 3D -камера, используемая для получения информации о изображениях заготовки, поддержки традиционной обработки изображений и обнаружения изображений глубокого обучения.
Шестимерный датчик силы: Kunwei (KWR75) или другие бренды выбираются для мониторинга информации о взаимодействии в реальном времени между эффектором-роботом и заготовкой.
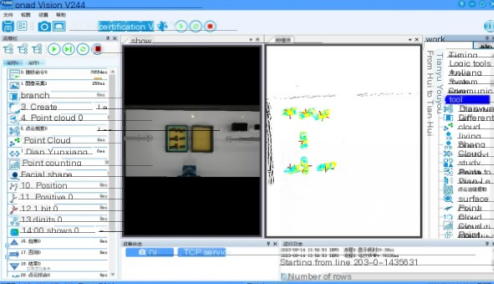
3 、 Конструкция верхнего компьютерного программного обеспечения
Основные функции:
Управление роботом: реализовать такие функции, как соединение, отключение, соединение или управление положениями роботов.
Управление камерой: реализация таких функций, как подключение к камере, отключение и сборы изображений.
Отображение состояния: отображение в реальном времени соединения робота и статуса позы, параметры состояния шестионого датчика силы и изображения, снятые камерой.
Эксклюзивные функции:
Сборка отверстий вала: благодаря работе верхнего компьютера в сочетании с технологией визуального осмотра и управления силой достигается автоматическая сборка отверстия вала.
Дизайн интерфейса: верхний компьютерный интерфейс должен быть кратким, чистым и простым в эксплуатации. Интерфейс должен включать основные кнопки функциональных функций и область отображения состояния, а также предоставлять доступ к функции сборки отверстия вала.
4 、 Реализация функции
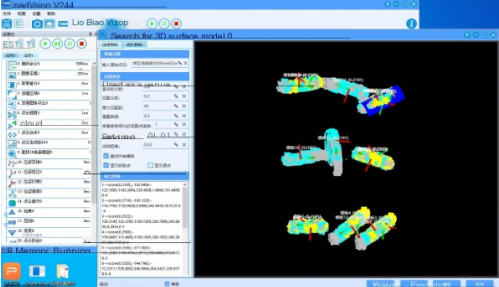
Машинное зрение:
Традиционное обнаружение изображений: использование соответствия шаблонов, подгонка круга, фитинг края и другие методы для поиска и распознавания заготовков, поддерживая распознавание штрих -кодов, QR, числа символов, а также расчет области серого и количества пластин.
Обнаружение изображения глубокого обучения: автоматическое распознавание и локализация заготовки с помощью алгоритмов глубокого обучения. Хотя глубокое обучение по -прежнему требует ручной аннотации изображений, мы будем стремиться повысить эффективность обучения и точности распознавания, постепенно уменьшая рабочую нагрузку аннотации.
Управление мощностью в сборе:
Комбинируя данные из шестимерных датчиков силы, достичь контроля силового взаимодействия между эффектором и заготовкой робота и полной точной сборкой отверстия вала.
5 、 Проектные риски и меры реагирования
Риск сотрудничества с шестью датчиками силы оси: из -за отсутствия сотрудничества с шестью датчиками силы оси может возникнуть определенные технические трудности и неопределенности. Мы организуем профессиональную техническую команду для решения проблемы и обеспечить плавную интеграцию и стабильную работу датчиков.
Риск обнаружения глубокого обучения: обнаружение изображения глубокого обучения требует определенного уровня точности и эффективности распознавания при соблюдении требования к одному клику. Мы будем продолжать оптимизировать алгоритмы глубокого обучения для повышения точности и эффективности распознавания, и в то же время изучает способы реализации одного клика.
6 、 POST расширение и переключение сцены
Верхнее компьютерное программное обеспечение принимает дизайн с открытым исходным кодом, который облегчает функциональное расширение и переключение сцены по мере необходимости в более позднем обучении. Например, сцена сборочной сцены отверстий вала может быть переключена на такие задачи, как сетка тонких шестерни или распознавание и захват других заготовков. Изменив и отлаживая программы с открытым исходным кодом, легко выполнять функции работы робота и визуального обнаружения в разных сценариях.
Этот план объединяет аппаратные ресурсы, такие как роботы, камеры и шесть датчиков силы оси, в сочетании с дизайном верхнего программного обеспечения с открытым исходным кодом, для обеспечения богатой и легко расширяемой учебной среды для платформы практики обучения роботов. Благодаря использованию практических платформ студенты могут получить более глубокое понимание принципов и применений технологий машинного зрения и контроля силы, а также улучшить свои практические и инновационные способности.
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
