











QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай

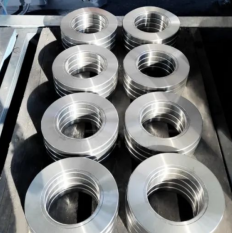
Благодаря быстрому развитию производственной промышленности спрос на автоматизацию и интеллектуальное производство растет день ото дня. Особенно в сценариях высокой и высокоэффективной производства традиционных методов кормления больше не достаточны для удовлетворения потребностей в производстве. Появление технологии 3D Vision обеспечивает новое решение для точного кормления сложных заготовков, таких как инерционные кольца.
Основной принцип технологии 3D Vision заключается в обработке и анализе трехмерной пространственной информации объектов через компьютеры, а также достижение таких операций, как распознавание объектов, обнаружение, отслеживание и измерение. При применении точного кормления инерционных колец технология трехмерного видения отражает трехмерную пространственную информацию инерционного кольца, предоставляя роботу точное положение и осанка, таким образом, достигая точного кормления инерционного кольца.
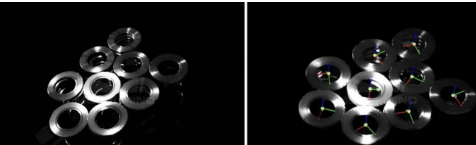
С точки зрения алгоритмов визуализации, технология 3D Vision использует передовые алгоритмы, чтобы справиться со сложными ситуациями, такими как поверхностное отражение и охват нефтяной пленки инерционных колец. Оптимизируя алгоритмы, система способна генерировать четкие и точные данные облака точек, обеспечивая прочную основу для последующего распознавания и захвата.
С точки зрения выбора камеры, системы 3D Vision должны выбирать камеры с высоким разрешением, большим полевым полем и большой глубиной резкости. Этот тип камеры может захватить полную информацию о форме и размере инерционного кольца, гарантируя, что робот может точно найти целевую позицию в процессе захвата. В то же время характеристика большой глубины поля позволяет камере поддерживать четкие эффекты визуализации на разных расстояниях, что еще больше повышает точность кормления.
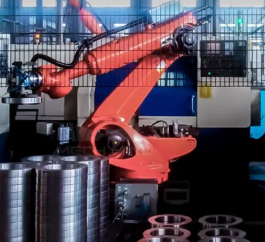
В дополнение к алгоритмам визуализации и выбору камеры, технология 3D Vision также должна быть тесно интегрирована с системами управления роботами. Передавая трехмерную пространственную информацию об инерционном кольце в реальном времени в систему управления роботом, робот может точно определить положение инерционного кольца и выполнить захват. Этот обмен информацией в реальном времени позволяет роботам быстро регулировать свои стратегии захвата при столкновении с инерционными кольцами различных спецификаций, достигая гибкого производства.
Технология 3D Vision сыграла важную роль в точном процессе кормления инерционных колец. Оптимизируя алгоритмы визуализации, выбирая соответствующие камеры и тесно сотрудничая с системами управления роботами, эта технология достигает эффективного и точного захвата инерционных колец, повышает эффективность производства и снижает затраты на производство.
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
