
















QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай








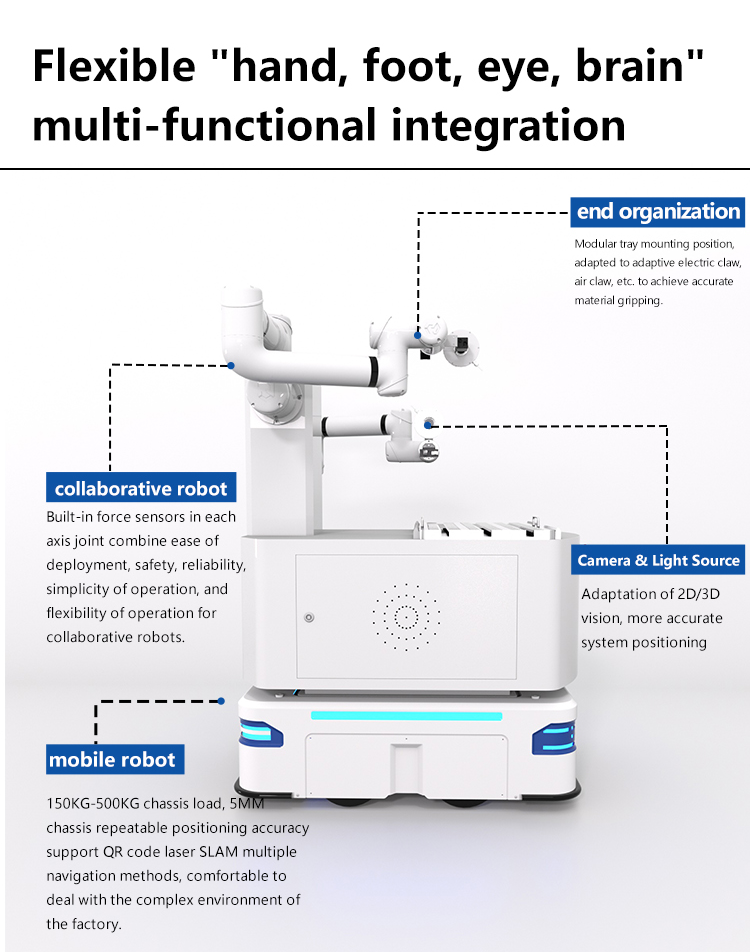
Составной робот с двойным рук 50012-GV-DA Особенности производительности:
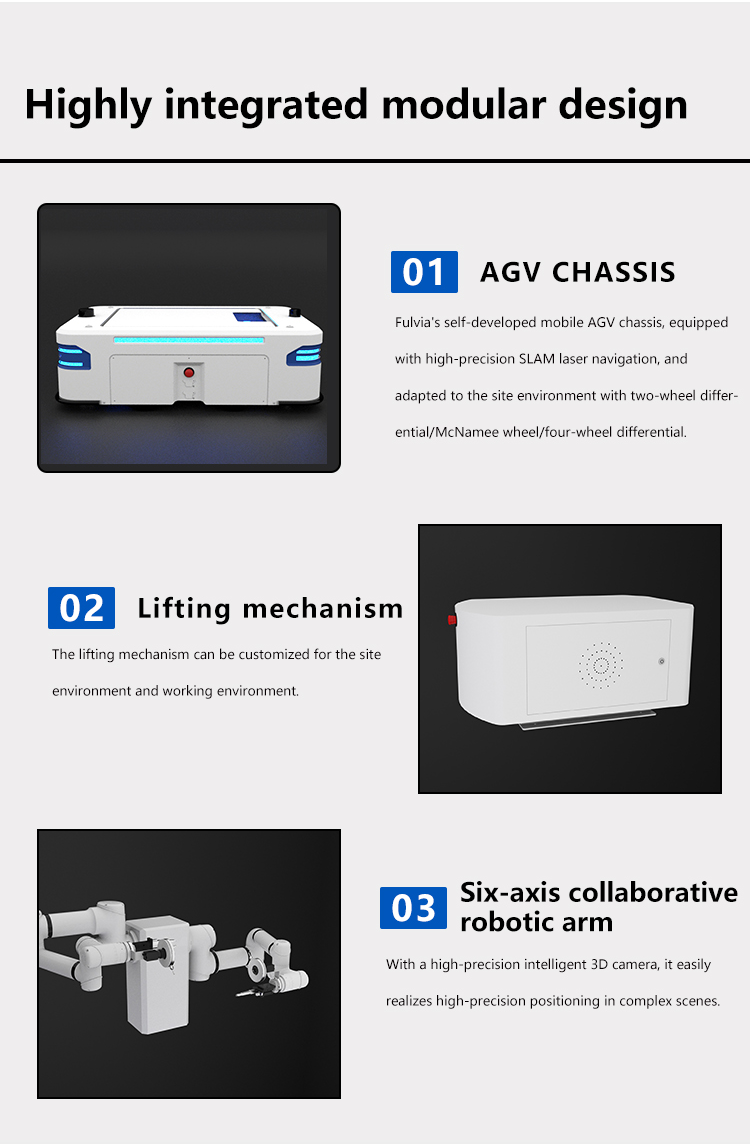
Высоко интегрированный модульный дизайн;
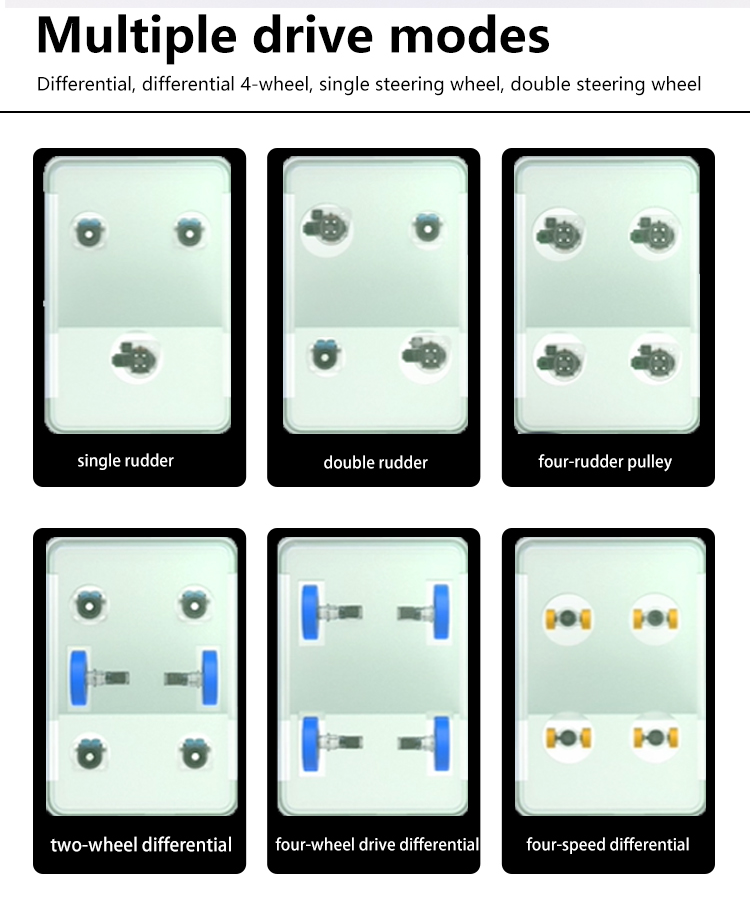
Многочисленные методы вождения: дифференциальный дифференциал с 4 колесами, одноуправляющее колесо, двойное рулевое колесо;
Независимо разработанные функции предварительного взимания приказов автостопы и сочетания заказов;
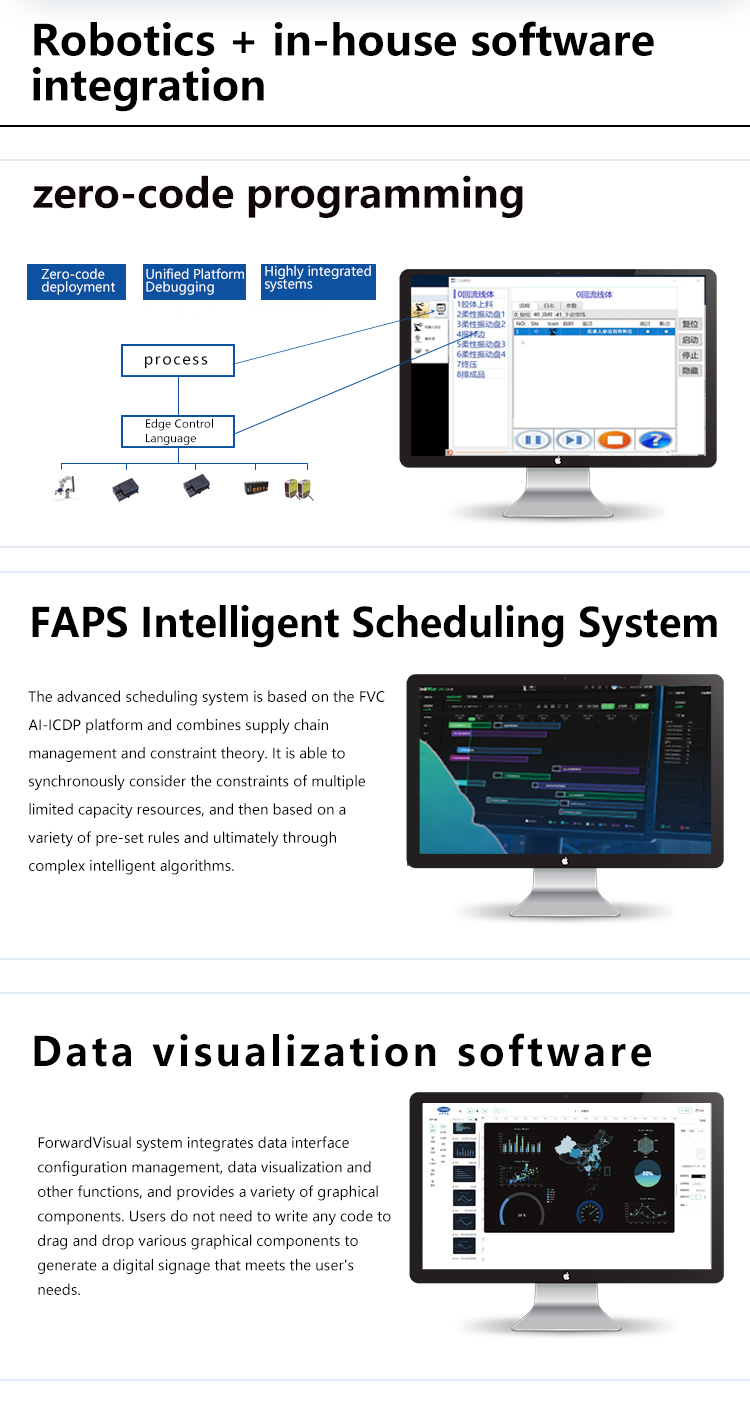
Интеграция роботов и саморазвитого программного обеспечения: программирование с нулевым кодом, интеллектуальная система планирования производства FAPS



Параметры спецификации:
| Модельный продукт |
ICR50012-GV-DA |
| Имя |
Робот с двойной рукой |
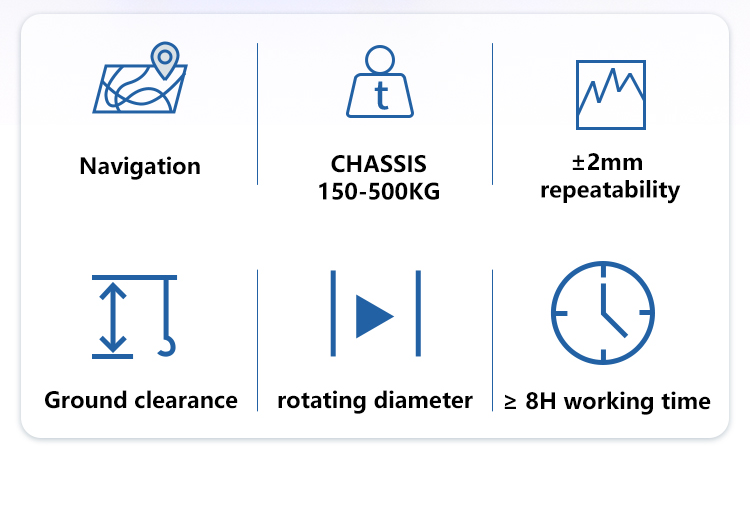
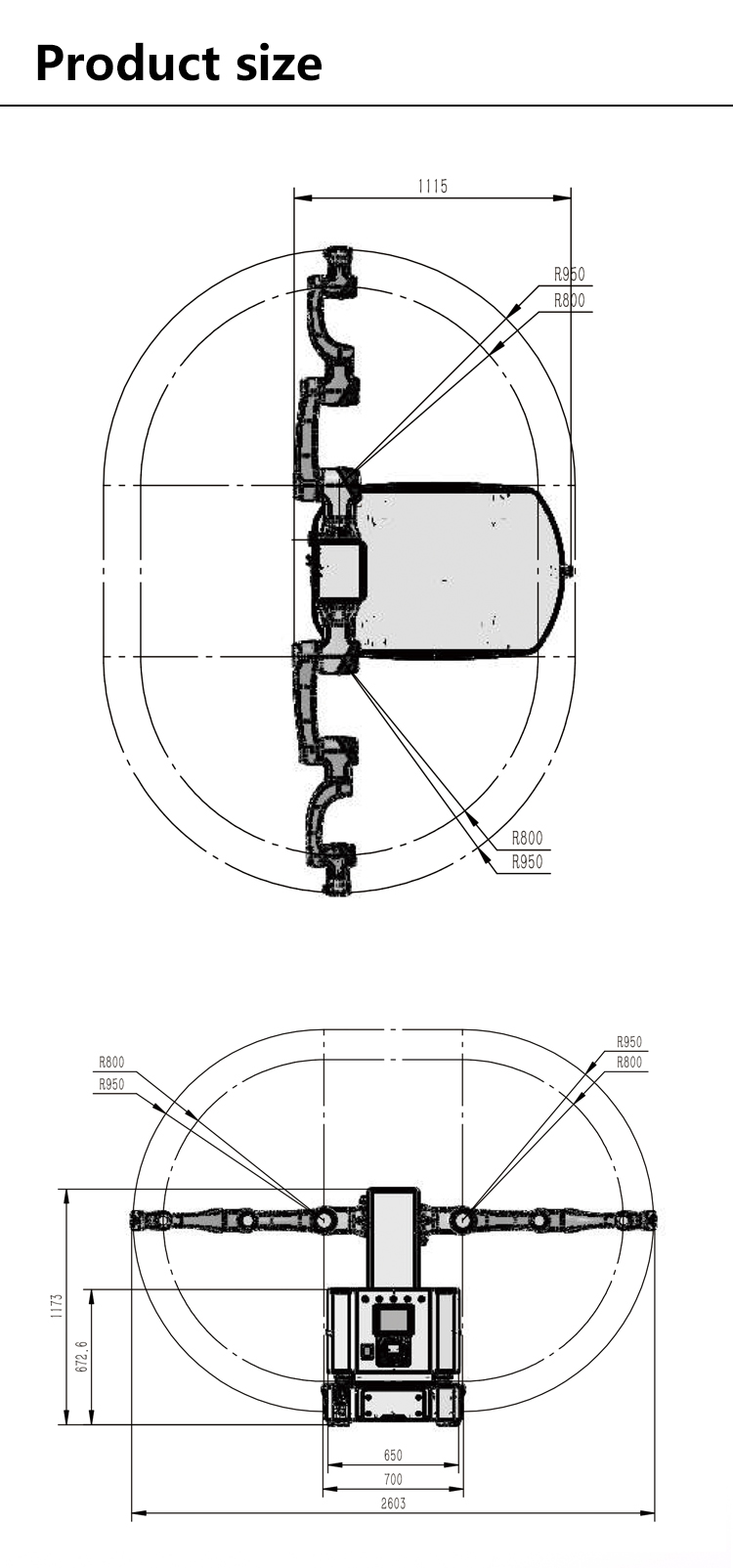
| Размер шасси AGV |
1000 мм*700 мм*200 мм |
| Скорость навигации мобильных роботов |
<1,0 м / с |
| Вес составного робота |
310 кг |
| Точность навигации мобильных роботов |
5 мм |
| Повторяющаяся точность позиционирования совместных роботов |
0,02 мм-0,05 мм |
| Самая высокая точность работы композитных роботов |
IMM (с 3D видением)/± 0,05 мм (с 2D -зрения) |
| программное обеспечение |
ForwardControl |
| Метод навигации |
Лазерный удар |
| Метод вождения |
Двух колеса |
| Способность восхождения |
20 |
| Емкость батареи |
48 В/52AH (тройной литий) |
| Время зарядки (10-80%) |
5,5 ч |
| 3D -функция предотвращения препятствий |
<2,5 часа |
| Функция автоматического пробуждения сна |
Стандартная конфигурация |
| Экран отображения HLM |
Стандартная конфигурация |
| Автоматическая функция зарядки |
Стандартная конфигурация |
| 3D видение конечного эффектора роботизированной руки |
Стандартная конфигурация |
| 2D видение конечного эффектора роботизированной руки |
Дополнительный выбор |


Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
Тел.
Электронная почта
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
