











QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай

Благодаря непрерывной разработке интеллектуальной технологии производства, применение автоматических производственных линий в области производства магнитной стали становится все более распространенным. Тем не менее, традиционные методы ручной загрузки и разгрузки имеют такие проблемы, как низкая эффективность, нестабильное качество и значительные опасности безопасности, которые больше не могут удовлетворить потребности современного производства. В ответ на эти проблемы мы предлагаем решение использования интеллектуальных композитных роботов Fuwei для загрузки и разгрузки магнитной стали, стремясь повысить эффективность производства, снизить затраты на рабочую силу, обеспечить безопасность эксплуатации и достичь автоматизации и интеллекта в производстве магнитной стали.
Боли промышленности:
1. Высокая зависимость от ручной работы приводит к низкой эффективности производства и нестабильному качеству;
2. Существуют угрозы безопасности во время эксплуатационного процесса, такие как несчастные случаи, такие как ручная зажим и воздействие;
3. Плохая рабочая среда представляет потенциальную угрозу для здоровья операторов;
4. Ручная работа трудно удовлетворить крупномасштабные и высокоэффективные потребности в производстве.

Обзор потребностей и решений клиентов
Спрос потребителей: клиент надеется достичь автоматической нагрузки и разгрузки магнитной стали через интеллектуальный композитный робот Fuwei, повышая эффективность производства и стабильность качества. Конкретные требования включают завершение загрузки и разгрузки двух типов продуктов, с временем цикла около 80 секунд для завершения загрузки двух стеков продуктов и наличия высоких требований к точности.
Обзор решения
Мы предлагаем следующий план реконструкции для удовлетворения потребностей наших клиентов:
1. Замените двигатель и сервопривод для повышения производительности и стабильности робота;
2. оснащен радиолокационной навигацией, легкими полосками и динамиками для улучшения автономной навигации, видимости и интерактивности робота;
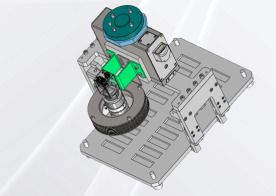
3. Разработка индивидуальных захватов, которые интегрируют камеры и датчики для достижения точной идентификации и захвата магнитной стали;
4. Оптимизируйте конфигурацию макета и оборудования областей загрузки и разгрузки, чтобы убедиться, что роботы могут точно и эффективно завершить свою работу.
4 、 Подробная реализация плана реконструкции
Составное преобразование робота

Выберите высокопроизводительные двигатели и серво-контроллеры, чтобы обеспечить точность и стабильность движения робота;
Оснащен радиолокационной навигацией для достижения автономного позиционирования и планирования пути роботов;
Установить светодиодные полоски и динамики тревоги, чтобы повысить видимость и интерактивность робота;
Проектируют индивидуальные Grippers, которые интегрируют камеры и датчики для достижения точной идентификации и захвата магнитной стали.
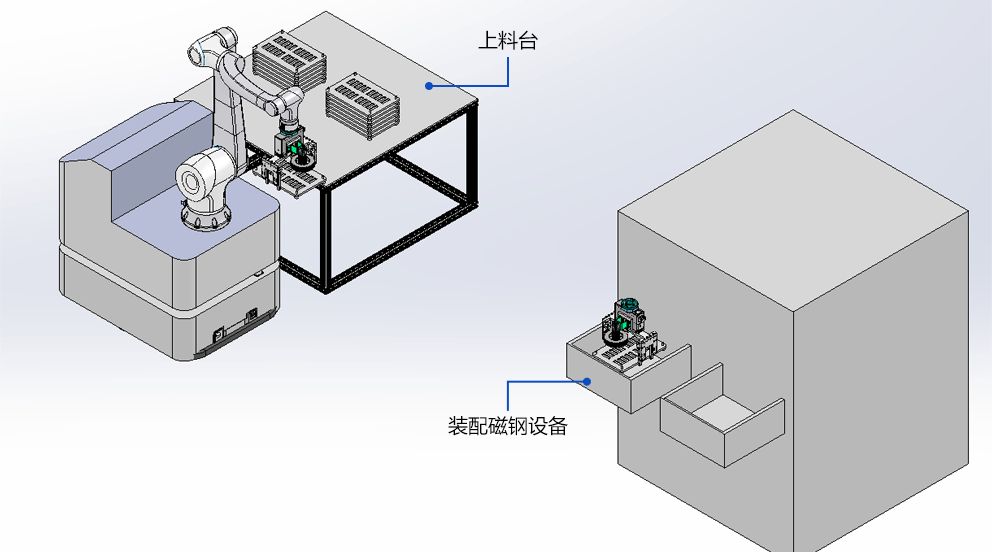
Оптимизация зоны загрузки
Слоты направляющих позиционирования дизайна для направления магнитной стали в назначенные позиции;
Установите маркеры позиционирования рабочего стола, чтобы облегчить распознавание роботов и позиционирование очков.
Реконструкция зоны разгрузки
Установите марку позиционирования устройства, чтобы робот точно помещал магнитную сталь;
Установите двери панели электрического управления и раздвижные слоты с электрическим управлением для защиты операторов от травм и достижения автоматического выброса оборудования.
Логика выполнения и оптимизация процесса
Логика выполнения всего решения основана на разработке процесса автоматизированных производственных линий, обеспечивая непрерывность и эффективность рабочего процесса. Весь процесс запускается с помощью запроса на загрузку, а робот выполняет операции поиска материала в зависимости от того, готова ли область загрузки. В процессе сбора и размещения материалов точное распознавание и контроль силы достигаются с помощью камер и датчиков, интегрированных в захватчик. Как только магнит будет успешно помещен на оборудование, робот подтвердит завершение загрузки и перейдет к следующему циклу.
Используя интеллектуальный композитный робот Fuwei для загрузки и разгрузки магнитной стали, мы можем эффективно решить проблемы традиционных методов ручной загрузки и разгрузки, повысить эффективность производства, снизить затраты на рабочую силу и обеспечить безопасность работы. В то же время это решение также обладает высокой масштабируемостью и гибкостью, которая может адаптироваться к производству магнитной стали различных масштабов и потребностей в производстве.
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
