









QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай

Мы предлагаем решение, основанное на руководстве трехмерного видения для удовлетворения требований к автоматизации для процесса чистки масла, сушки, загрузки и разгрузки панелей алюминиевых сплавов. Это решение достигает высокого распознавания и позиционирования панелей путем введения передовой технологии 3D Vision, тем самым повышая эффективность производства и стабильность качества.
Обзор плана
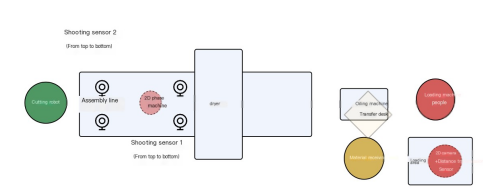
Этот план достигает точной идентификации и позиционирования панелей алюминиевых сплавов путем настройки систем трехмерного зрения в областях загрузки и разгрузки соответственно. Площадь кормления принимает метод всасывания, чтобы гарантировать, что панели входят в производственную линию плавно и точно. Область разгрузки автоматизирована роботами для захвата и размещения досок. В то же время, чтобы гарантировать, что процесс смазания не вступает в контакт с передней частью продукта, мы разработали смазочное устройство в качестве бокового или верхнего метода смазания.
Внедрение плана
Реализация зоны загрузки
В области загрузки мы установили систему 3D-зрения, которая включает камеру с высоким разрешением и блок обработки изображений. Когда датчик обнаруживает заготовку, камера сразу же делает снимок и передает данные изображения в блок обработки изображения. Блок обработки изображений обрабатывает изображение с помощью алгоритмов, извлекает информацию о контуре и положении платы и вычисляет значение Y1 платы. Затем, основываясь на значении Y1, всасывающее устройство контролируется, чтобы точно высосать пластину и плавно подавать ее в производственную линию.
Реализация зоны разгрузки
В зоне разгрузки мы также оснащены системой 3D-зрения и роботом с высокими функциями захвата и размещения. Когда датчик 1 обнаруживает заготовку, камера делает снимок и обеспечивает значение Y1 продукта 1; Впоследствии, когда датчик 2 обнаруживает заготовку, робот точно охватывает продукт 1 на основе значения Y1 и помещает ее в назначенное положение. Точно так же, когда датчик снова обнаруживает заготовку и обеспечивает значение Y2 продукта 2, робот снова выполняет операции по схватке и размещению. На протяжении всего процесса мы оптимизировали алгоритмы и калибровали параметры камеры, чтобы обеспечить точность размещения, соответствовая требованию ± 2 мм.

Решение:
Мы приняли следующие меры для решения сложности достижения точности размещения ± 2 мм для фидера:
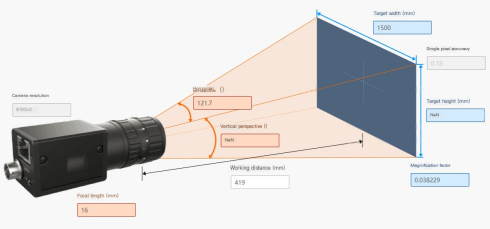
Улучшение разрешения камеры и ширины поля зрения: выберите камеру с более высоким разрешением, чтобы повысить точность данных изображения; В то же время отрегулируйте поля вида камеры шириной в соответствии с фактической ситуацией производственной линии, чтобы обеспечить охват всего рабочего процесса.
Оптимизируйте алгоритмы обработки изображений: проводя углубленные исследования характеристик и текстур поверхности панелей алюминиевого сплава, оптимизируйте алгоритмы обработки изображений для повышения точности распознавания контура и расчета положения.
Точная калибровка параметров робота: точная калибровка робота, включая такие параметры, как длина и углы соединения роботизированной руки, для обеспечения высокой стабильности и точности во время схватки и размещения.
Это решение достигает эффективной автоматизации процесса чистки масла, сушки, нагрузки и разгрузки панелей алюминиевых сплавов путем введения технологии 3D Vision. Оптимизируя алгоритмы и точную калибровку параметров оборудования, мы успешно решили проблему точности размещения фидера, повышения эффективности производства и устойчивости качества.
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
