











QR код

О нас
Продукты
Контакты

Телефон

Электронная почта

Адрес
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай

Обзор проекта
Этот проект направлен на разработку эффективной и стабильной системы автоматической зарядки самосвалов для удовлетворения потребностей клиентов в помещении в помещении в регионе Шаньси. Система должна достичь беспилотной эксплуатации и управления инженерными транспортными средствами, только выполняя функции обработки и автоматической зарядки точек A и B для удовлетворения непрерывных требований к эксплуатации производственной линии.
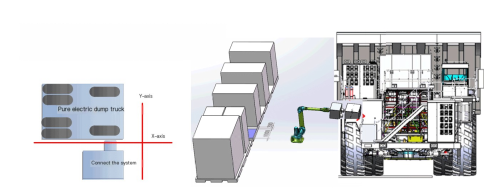
Системный состав
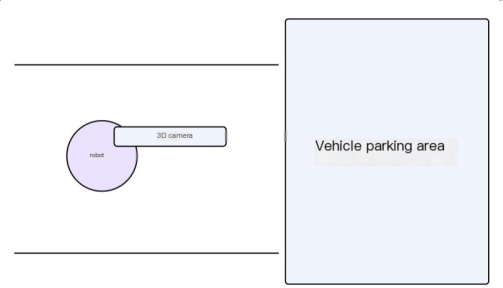
Система визуального позиционирования: использование камер с высокими определенными камерами и визуальных алгоритмов для достижения точного позиционирования порта зарядки на самосвальных грузовиках. Визуальная система должна иметь возможность противостоять пыли и прямому солнечному свету, обеспечивая стабильную работу в различных внутренних средах.
Роботы и механизмы толкания пистолета: выбираются промышленные роботы с пролетом рук 3 м и более, оснащенные специально разработанными механизмами толчки пистолета. Механизм отталкивания оружия должен иметь достаточную тягу и точность, чтобы гарантировать, что зарядное пистолет может быть точно и быстро вставить в порт зарядки.
Система зарядки: оснащена мощным зарядным оборудованием в 3 мегаватта, что обеспечивает полную зарядку самосвалов за короткий промежуток времени и повышение эффективности производства.
Система управления: с помощью интегрированной системы управления, может быть достигнуто точное управление визуальным позиционированием, движением робота и процесса зарядки. Система управления должна иметь высокие характеристики автоматизации и интеллекта и иметь возможность достичь беспилотной автоматической зарядки.
Рабочий процесс
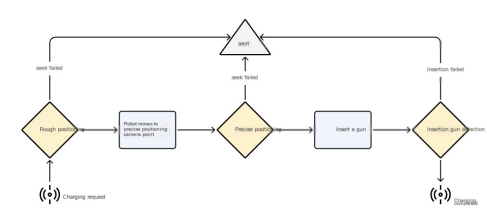
Самостоятельное положение грузовика: определить и найти положение порта зарядного самолета через систему визуального позиционирования.
Движение робота: Система управления направляет робота для перемещения рядом с портом заряда самосвалов на основе результатов визуального позиционирования.
Проталкивающая вставка оружия: робот оснащен механизмом сжимания оружия, который точно и быстро вставляет зарядное пистолет в зарядный порт самосвалов.
Процесс зарядки: система зарядки начинает заряжать самосвал, пока не достигнет заданного уровня мощности или времени.
Эвакуация робота: после завершения взимания робот будет эвакуировать порт зарядки и ждать прибытия следующего самосвалов.
Ключевая технология
Технология визуального позиционирования: с помощью таких алгоритмов, как глубокое обучение, точность и стабильность систем визуального позиционирования могут быть улучшены.
Технология управления роботами: оптимизировать траекторию движения робота и скорость повышения эффективности зарядки.
Проектирование механизма отталкивания оружия: убедитесь, что механизм толкания оружия имеет достаточную тягу и точность, учитывая его структурную компактность и надежность.
Ответ риска
Защита окружающей среды в помещении: убедитесь, что чистая и сухая внутренняя среда, уменьшите влияние пыли и прямого солнечного света на систему визуального позиционирования.
Техническое обслуживание оборудования: регулярно поддерживать и охранять оборудование, такое как роботы и системы визуального позиционирования, чтобы обеспечить их нормальную работу.
Профессиональная оценка: пригласите специалистов оценить и оптимизировать механизм толкания оружия, системы зарядки и т. Д., Чтобы обеспечить безопасность и выполнимость решения.
№ 22, Hongyuan Road, Гуанчжоу, Гуандунская провинция, Китай
